|
Hey Electrified Miata team, here's the latest update in the never ending quest to go faster, have fun, and be safe! For those of you following along, last week, the plans were to do battery cell testing, so we know what to expect when we place a large load on a battery pack. As seen in last weeks video, the go-kart was quite slow compared to the lead-acid version. The kart doesn't corner very well either because all the weight that used to be on the front tires with the 180lbs of lead battery aren't there any longer while the weight on the back remains the same resulting in a kart that doesn't want to turn. That situation is exasperated by not having enough power to help it turn with the throttle. Wouldn't it be nice if we could just turn up the power? Maybe we can! It all depends on the results from cell testing which was finished last week! The first step in our cell testing was to gather the appropriate parts. We won't be testing to destruction as I'm not really interested in lithium fires. My high school chemistry teacher (thanks Mr. Colgan) showed me how lithium and H20 react. Energetic is a good word for it. As luck would have it, my Dad had some spare power resistors that he used in testing audio amplifiers that would be quite suitable for testing a few cells. Some high school math was also required to calculate the load, because some of the parts I would I combine for the load were not like the others. The formula is 1/Req = 1/r1 + 1/r2 + 1/r3 + ... + 1/r(n). I charged the cells up 4.15 volts and soldered them together to simulate a 'pack'. 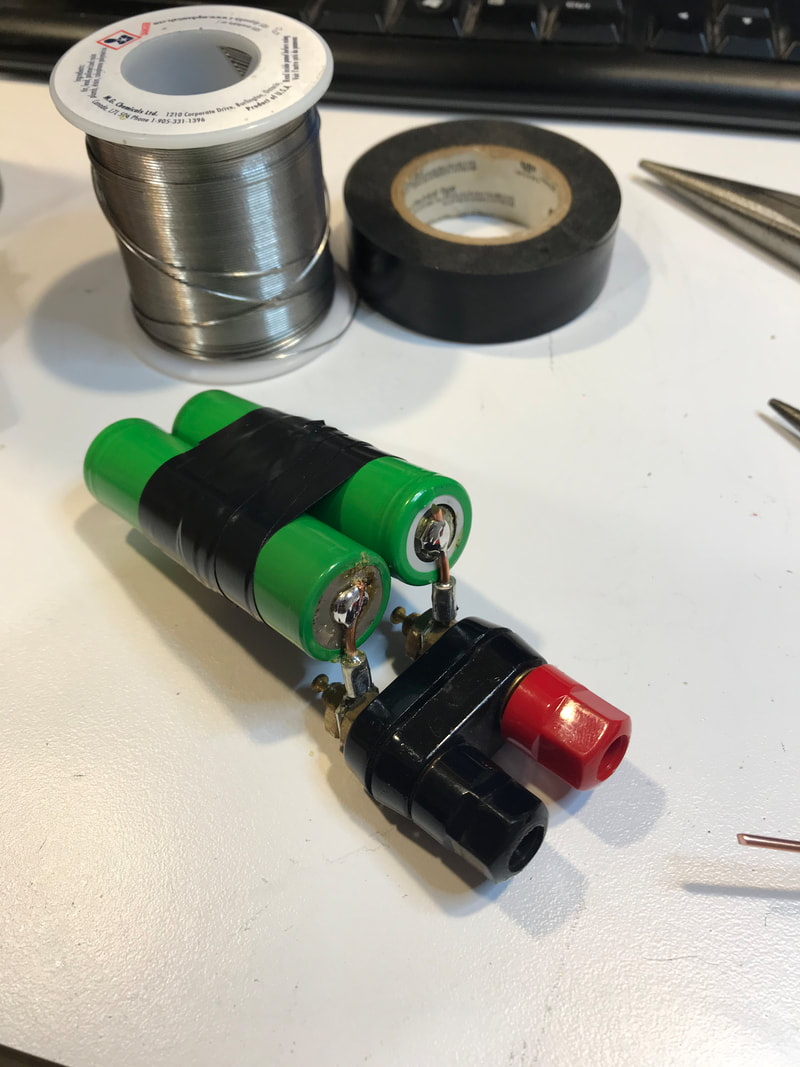 Then I proceeded to take measurements before and while I connected a load using Dad's resistors, simulating our motor. Again, not being interested in lithium fires (at least not if the office!), I only connected the load for about 10 seconds. I continued to increase the load by putting more resistors in parallel. Connecting resistors in parallel has the combined effect of lowering the resistance value, making the batteries work harder and harder. To push the batteries beyond their rated capacity (as Teresa reviewed this, said, "In our #@&*@ house? Sigh), I had to add a spool of wire to the resistors.
The following are the results: StartingVolts VoltageWithLoad VoltageDropPerCell Resistance Amps 8.30 8.10 0.100 5.10 1.59 8.30 7.92 0.190 2.55 3.11 8.29 7.78 0.255 1.69 4.67 8.29 7.59 0.350 1.27 5.95 8.26 7.44 0.410 1.03 7.24 8.25 7.33 0.460 0.86 8.54 8.22 6.89 0.665 0.53 12.95 So what do the results tell us? Since we are only seeing a voltage drop of about 1 volt on the Kart with our current pack under load, and the batteries are rated to 10 amps (and don't get hot in a 10 second burst), that means we should be seeing a
10 volts drop which is approximately 0.5 volts per cell times 20 cells in series. This means we can push the battery pack *much* harder than we currently are. (Doing the happy dance) With cell testing out of the way, I moved to the next task. I briefly looked at go-kart tires as going faster will mean more tire wear and our fronts are looking a bit thin. I also looked at Anderson Powerpole connectors and retainers to prevent the battery pack that powers the Pi from coming apart, yet still allowing an easy disconnect. Thursday night rolled around and we'd had canceled car night, because we were waiting on parts and progress. I had forgotten that I agreed to meet with Brian so we could work on our touch screen technology. The surprise must have shown on my face when Brian rang the door-bell. That surprise was a good one. Brian and I found, installed and ran some software packages that may work quite well on my Linux desktop. I need to verify the same software will run on the Pi as they did on my desktop machine. For those of you following along for all the technical details, it looks like Flask, Socketio and Eventlet are the software packages we need. We need these allow a socket formed to the browser, so we can update the user when the battery gets low as opposed to the browser continuously polling the Pi. I've also started on a second battery pack and Joe just received 20 BMS boards so when assembled (assuming the software works), we'll be able to monitor the pack while driving and monitor and balance the pack while charging! The goal for next week is to verify our display technology on the Pi, turn up the Kart performance and fix the relay dropping out problem as well as publish our current software on Gitlab. I'm still waiting on parts for the second battery pack, which will when finished, allow us to re-test the Leaf motor(s) and see if we can make them spin. So many exciting milestones on the horizon! As always, thanks again for reading.
0 Comments
Leave a Reply. |
AuthorBill likes cars that understand the 'go fast now' pedal. Archives
May 2022
Categories |


 RSS Feed
RSS Feed