|
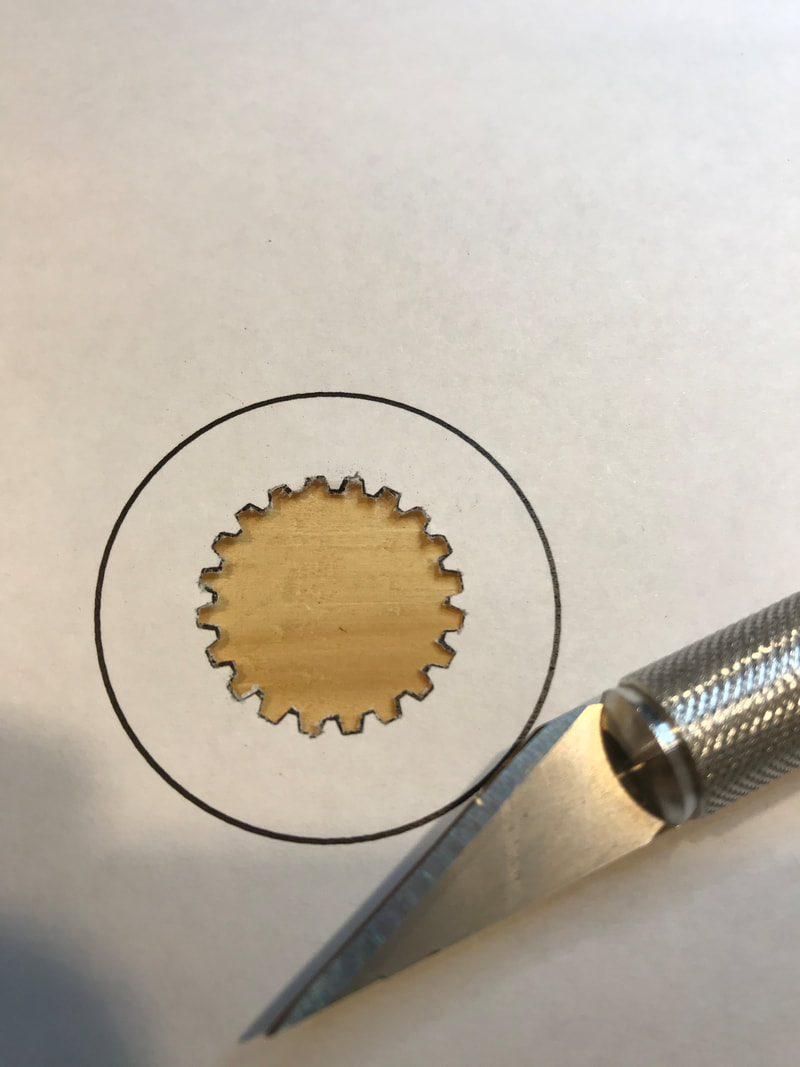
Hey Electrified Miata team, here's the latest update! For those of you following along, last week the goal was to finish the second battery pack and attempt to get one of our Leaf motors spinning. I finished the second battery pack and charged it up. I moved all the components into the the garage and the moment of truth had arrived.  Was it really true that the reason the inverter refused to run was low voltage, or was there some other issue, most likely software? It took a lot of work to get to this stage. First I had to join two systems together. The kart system controlled the high amperage contactors. This system had to be connected to the Leaf system which had only simulated high amperage by activating small relays. The two systems were joined together via Ethernet cables, a hub, and a little code magic. I also got to use my special high voltage gloves! The voltage was just over 300 volts DC. My heart was racing as the contactors snapped close and the 10 second countdown began. The inverter fault didn't happen! Wow. The possibility of spinning the motor was one step closer and the tension was raised another notch... Now we're going to test code that never had been tested before. Will the motor straps hold the motor down? Will the wires melt if I accidentally command too much power? Can the power supply give enough current? It seemed like everything that could go wrong was running through my mind at once as I prepared to move the mouse and tell the motor to go! Would I be disappointed or not? As I clicked the mouse, the inverter gave its distinctive whine and the motor started to spin! Oh my! Now elation is a very real possibility. All the pressure of having to invest more money, time and energy into getting the fun was lifting. My visions of making the motors sing was one step closer and a new excitement gripped me. It actually works. Does it work perfectly? Not even close. Some of the command settings don't activate the inverter and some of the settings cause the inverter to fault. Once the inverter enters the fault state, it has to be powered down and powered up again before it will take new commands. I was getting frustrated at trying to figure out why it didn't work and set the forward direction pretty high. The motor revved up, and then started slowing down leaving me puzzled. I saw the bus voltage dropping, and dropping below 300. Oh oh. No smoke, no melted wires, must have blown the fuse. Sure enough, fuse blown.  What kind of fuse is it? I know a little bit about fuses, but I called my Dad who is more knowledgeable about fuses. Since I couldn't see the fuse body, I didn't know if it was a slow blow or fast blow. I told him the number and he knew right away what type it was - fast blow. I found an acceptable fuse replacement and was able to get back to work! After a while of being frustrated with the torque commands, I got curious about the rpms indicated by the motor. Ed had lent me his mechanical rpm gauge and I now I could use it.  The rpms that his gauge showed didn't match the rpms shown on the screen. This indicated a software problem. As I studied the relationship between the mechanical gauge and the screen, I noticed the rpms on the screen were about 4 times as large as the real rpm. Oops! Instead of dividing by 2, I multiplied by 2, which accounted for the factor of 4. Changed one line of code and the rpms agreed with the mechanical gauge. One thing fixed! I told the guys about the partial success and started fretting about the mechanical coupling. My friend Doug Kimber who lives in Illinois, whom I've know since 1988 jumped in and offered some help. After requesting a few measurements, he produced a CAD drawing of a possible coupler. On his instructions, I printed the drawing and cut it out with an Exacto knife and fitted that on to the motor shaft.
Since my cutting isn't that precise, we'll be doing a laser cutting in acrylic and try that on the motor for further verification that the sizes and angles are correct. I'm so blessed to have amazing friends to help me on this project!
Since the motor was spinning, this meant I needed battery packs 3 and 4 to do any heavy duty testing as my little power supply can't supply the current needed to make these motors sing. By the time car night rolled around, I have gotten to step 2 on pack number 3. I'll also being working on pack number 4 because both batteries need finished to get the supply voltage high enough for serious testing. The covid virus is affecting my supply chain. I've ordered some of the parts for pack #5 (the last pack needed to reach full power), but nothing is shipping as of yet. I will focus on what I can do rather than grouse about what I can't do. For me, when something doesn't work, I dive into it. If I still can't fix it, I move on to something else and let my unconscious mind do it's magic. Since I couldn't figure out the torque codes, I started working on the BMS code which I'll need to re-charge the batteries and balance them. I was able to communicate with the one board I have. I also talked with Joe who is making great progress on getting the boards to accept new firmware without special hardware. This is very important so as we need different functionality or a bug fixed, we'll be able to do this with the board still attached to the pack. The previous code base didn't allow for this, so Joe is having to modify the original firmware to accommodate this. I'm feel so much gratitude to have amazing friends with a wonderful variety of skills. Brian called me on car night and had fixed my code that I couldn't get working last week on our display technology. He'll be creating better examples so I'll be able to get more and more working and visible from a web-page. This will make our display's easier to swap and much cheaper by using standardized components like a chrome web browser in a tablet. I've ordered a few more Pi's so we'll have enough computer power to handle all these various tasks that are need for an electric car. The Pi's shipped right away. Next week is work on battery packs 3 & 4, trying to extract Diagnostic codes from leaf inverter, testing and interfacing to a 'hall effect' accelerator pedal, and whatever else I may have time for. Building batteries is pretty tedious work, but needs to happen before I can progress to any serious testing Leaf motor testing. Stay tuned and thanks for reading. May you all stay in good health!
0 Comments
Leave a Reply. |
AuthorBill likes cars that understand the 'go fast now' pedal. Archives
May 2022
Categories |

 RSS Feed
RSS Feed