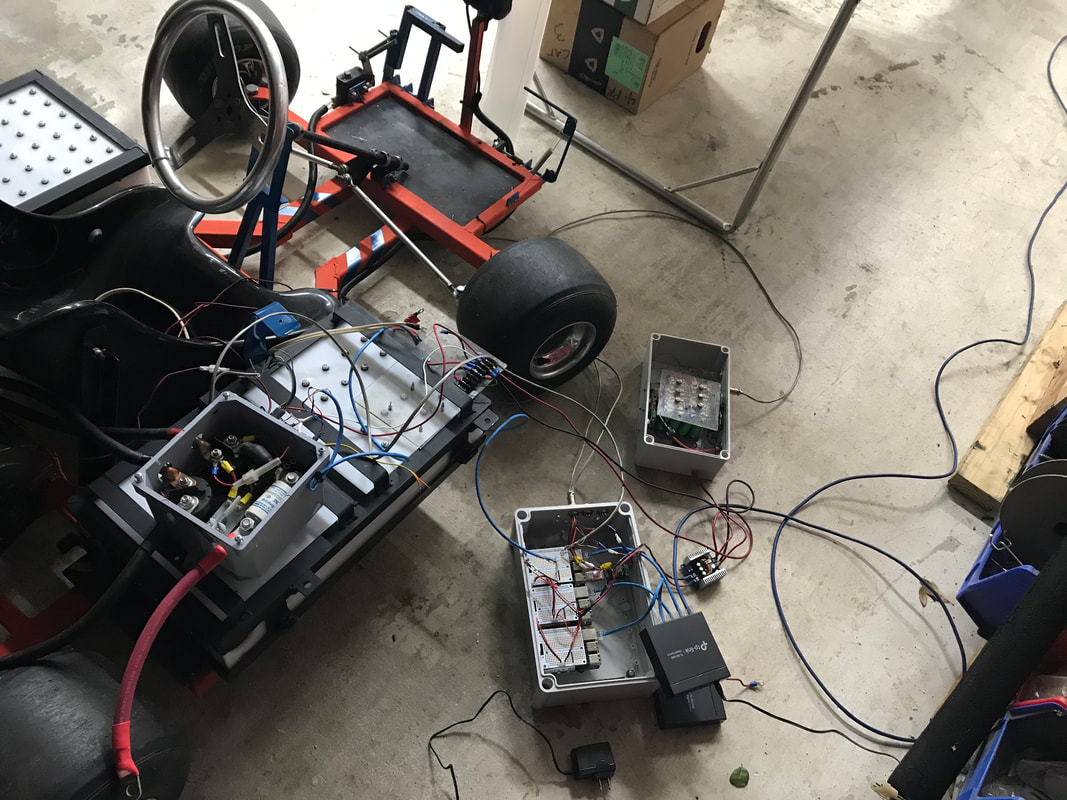
 Imagine three people huddling around a mass of wires attached to a go-kart, silently staring at their phones, specifically the web browser, pushing a button and listening for that audible 'click' an electric relay makes. That describes go-kart night this week! Join us on the journey to go faster via the magic of electrons. Last weeks goals were: 1. Remove the dependency on the internet from our JavaScript code and install those resources on the Pi. 2. Oodles of wiring and soldering and testing each piece along the way. The contactors had better work properly and in the right sequence before being tested with 440 amps connected. 3. Programming the go-kart motor controller to use the correct voltage and power for these eMiata battery packs. How does the song go; "two out of three ain't bad" - but I'm still feeling a little lackluster for missing goal number two. Just look at all those wires. Everything took longer than I thought, starting with goal number one. Removing the internet dependencies JavaScript requires the use of "Node Package Manager", (NPM). What is NPM you might ask? I didn't know either so I looked it up. NPM will assemble a package or set of files that contain useful bits of JavaScript, a programming language used on web browers. We use JavaScript to make our buttons and progress bars on the user interface. I only needed three little files, how hard could it be? After fumbling around with NPM, I managed to get 1039 new JavaScript files on my computer. Lucky for me, Brian has supplied me with the approximate names of the three I needed. Then our web server, running on the Pi needed to know where these three files are located. After figuring that out, internet dependent no longer! Goal number one finished! Goal number two was trickier. Three Raspberry Pi computers sitting next to each other require prototype board to be installed. 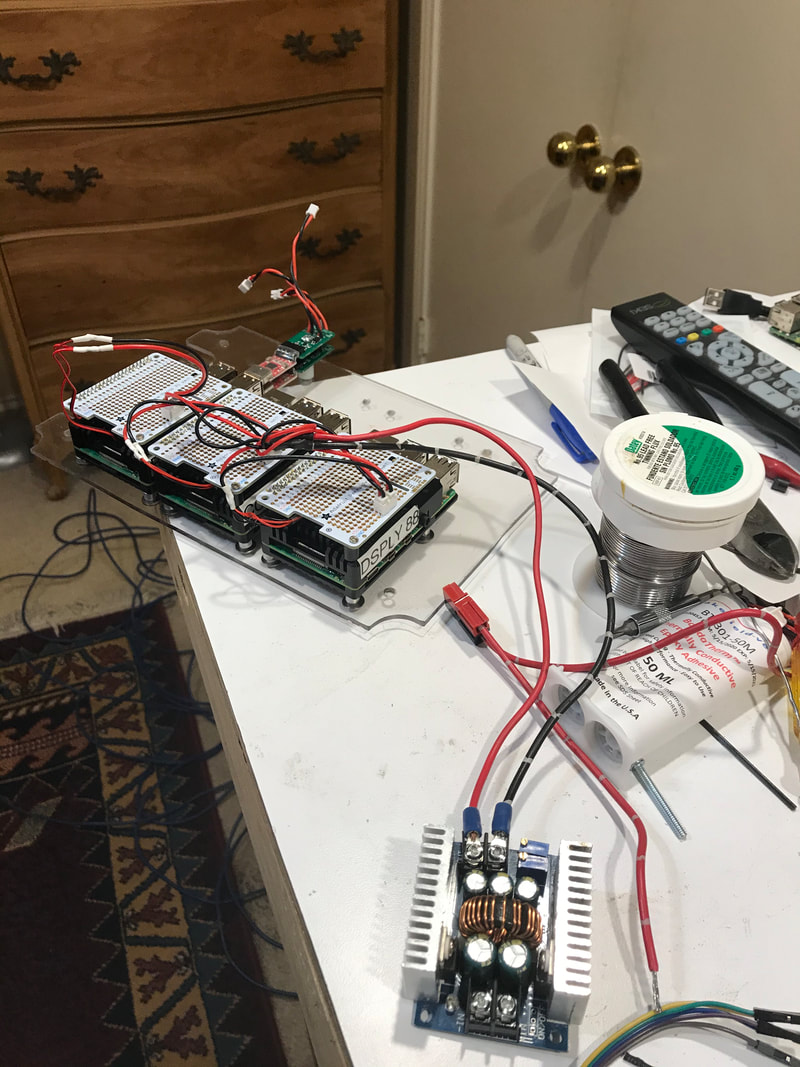 Once the Pi's are mounted this close, we can no longer use the USB-C power connector on the side of the Pi, but instead supply 5 volts to the prototype boards. I used connectors for the fans and power so we can remove the prototype boards if we needed to replace/repair an individual Pi. I soldered one of the prototype boards connectors upside down. For some reason, I didn't think this would cause any problems, since I wouldn't be using the I/O in this Pi. However, I quickly changed my mind when the Pi didn't power up. Dang! Did I burn anything up? I may have a Pi with a burned out I/O bus but it still works for a wireless web server. I had spare Pi prototype boards, but no other connectors, meaning I had to salvage this one. A solder sucker helped, but still the connector still wouldn't come loose. I ended up completely destroying the circuit board to save the connector. That took 1/2 hour to get it apart and another 1/2 hour of pin straightening and cleaning to get it back together. Thankfully the Pi did power up and run! This allowed me to pass my first of many tests with all the Pi's running off the 5 volt regulator! With the Pi's mounted and supplied with power, I started working on the wiring. First I wired the three thermistors (devices for measuring temperature) to one of the Miata batteries 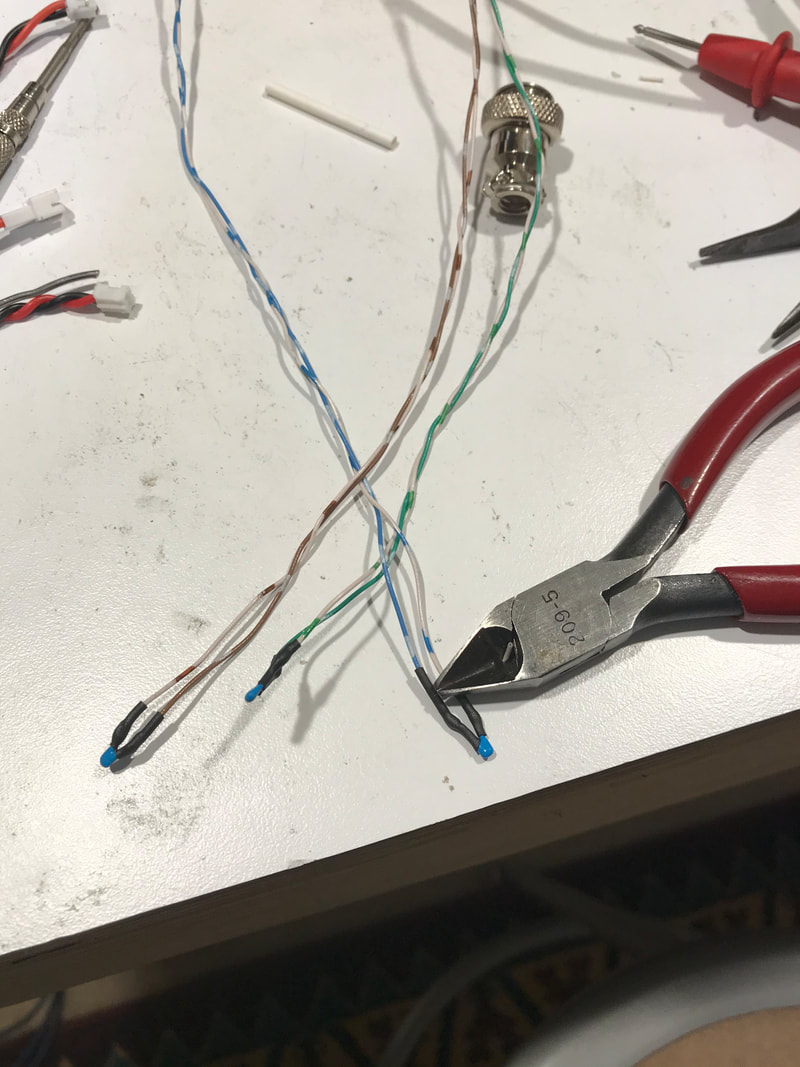 We want to learn as much as we can before mounting everything in the car and these devices will help us with that. Then we need to connect the contactor box with a Pi's so we can control the start up sequence and keep the batteries disconnected from the go-kart controller when not in use. I found out the prototype boards doesn't have every single General Purpose Input Output (GPIO) pin exposed. Rats! My software used one of the GPIO pins not present on the prototype boards. Knowing that goal number 3 depending on my being able to power up the controller, I wired the Pi directly to the relay box. When I was testing the new software, I notice that the relays would flicker briefly when the system was initializing. I don't want ANY flicker when controlling large amounts of power. I double checked my code. How did this work correctly when used for the Leaf motor? Was this a new version of the GPIO library? After some research, I found a 'no flicker' solution that will be used on for the Leaf/Miata version. Better to find problems now with our go-kart rather than on the side of the road, or worse with large sparks. While goal number two was not fully achieved, I did get far enough for us to work on goal number 3 by the time car night came around. The kart controller could be powered up through our web user interface and we were able to program the kart controller to the proper battery voltage range. The controller has a nice feature where it won't function if the battery voltage is either too high or too low. This helps us as an extra safety check on the batteries. If the batteries are too discharged, the kart won't turn on. We turned all the controller settings to the maximum power and verified the kart wheels would spin while on blocks. Now I've got to get all those pesky wires tucked in someplace! Go-karts are a lot of fun, but what about the Miata? The Miata is ready to get towed back to my house so I really need to to get the go-kart out of the way. Have the parts mounted to the kart would be much tidier than strewn all over the temporary work table. Check out the Leaf motor and transmission mounted on a test stand.  You'll see more of this as we'll be testing out clutch-less shifting by RPM matching on this stand before we attempt it in the car.
Our college intern, Eric is going back to college. Thank you Eric for all the hard work. I hope you'll look back at this experience and smile at all the learning. Eric assured me that he can come back on a weekend if needed. He *will* be needed since a replacement soft top for the Miata has been ordered. Goals for next week are: 1. Order more connectors and replace the circuit board I destroyed. 2. Find out why one thermistor reading is way off 3. Finish wiring 4. Modify the user interface, specifically to add the BMS readings and to add a shutdown button, to cleanly shutdown the Pi's 5. Test go-kart settings. As always, thanks for reading.
0 Comments
Leave a Reply. |
AuthorBill likes cars that understand the 'go fast now' pedal. Archives
May 2022
Categories |
 RSS Feed
RSS Feed